
염증 없이 체내에서 분해되는 소프트 의료로봇 개발
국내 연구팀, 다기능 소프트 마이크로 의료로봇 성공
입력 : 2024.05.20
){kind=link}
){kind=link}
){kind=link}
최근, 유선 타입의 유압, 공압, 전기 등의 에너지를 이용한 소프트 로봇 연구와 더불어, 마이크로/나노 기술, 무선 구동/자극 기술, 바이오 기술이 융합된 기능성 소프트 로봇은 의생명 응용분야에서 체내/외에서의 질병을 치료하기 위한 목적으로 개발 중에 있다.
그러나, 현재까지 개발된 소프트 로봇은 대부분 자연에서 영감을 받은 생체 모방 운동과 제한된 응용 분야만을 보여줬다. 특히, 의료 분야에서, 기존 소프트 로봇은 재료적 한계로 인해 생체 적합성, 생체 분해성, 실시간 체내 모니터링 확보가 어렵다는 한계점을 지니고 있었다.
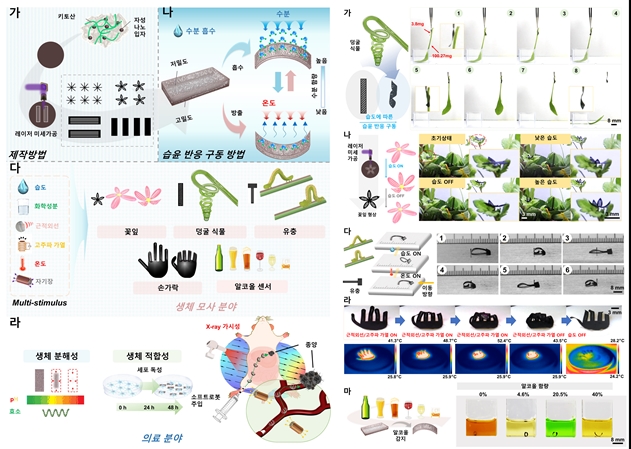
한국연구재단은 고광준 교수, 한국마이크로의료로봇연구원, 최은표 교수(전남대학교) 공동연구팀이 외부 환경(습도, 화학성분, 근적외선, 고주파 가열, 온도, 자기장)에 따라 움직이며 생체 적합성 및 분해성, 실시간 체내 모니터링 기능을 갖춘 소프트 마이크로 의료로봇 개발에 성공했다고 밝혔다.
현재까지 개발된 소프트 로봇의 경우 형상 변화를 이용한 생체모방 움직임을 구현하는 데 연구가 집중돼 있어 응용 분야가 극히 제한적이었다. 특히, 재료적 한계로 인해 생체 적합성 및 분해성, 실시간 체내 모니터링 확보가 어려워 비침습적 방법으로 병을 진단 및 치료하고 이에 맞는 형상 변화와 구동, 자극 등을 고려해야 하는 의생명 응용 분야에 소프트 로봇을 적용하기에는 한계가 있었다.
이에 연구팀은 체내에서 분해 가능한 천연고분자(키토산)와 자기 반응 재료인 자성나노입자를 재료로 활용, 기존 소프트 로봇의 부드러운 움직임은 유지하면서 원하는 위치로 이동 및 추적이 가능하고, 임무 수행 후 스스로 녹아 없어지는 다기능성 소프트 마이크로 의료로봇을 개발했다.
로봇 표면에 미세패턴을 새겨 약 1도의 오차로 원하는 방향으로 휘어질 수 있도록 제작했다. 더불어 자성 나노 입자의 자기장 반응성을 이용해 원하는 위치로 이동이 가능하도록 고안했다. 이를 통해 기존 소프트 로봇처럼 다양한 생체 모방 움직임(꽃잎, 덩굴 식물, 유충, 손가락)의 구현이 가능할 수 있었다.
고광준 교수는 “이번 연구에서 개발된 소프트 마이크로 의료로봇은 기존 소프트 로봇의 재료적인 한계를 극복하고 제한된 응용분야를 의료 분야로 확장할 수 있음을 보여줬다는데 큰 의미가 있다”며, “향후 지속적인 연구를 통해 질환 치료 및 재생과 체외 질환모델, 약물 스크리닝과 같은 의생명과학 분야에서 플랫폼으로 활용할 수 있을 것으로 기대된다”고 밝혔다.
과학기술정보통신부와 한국연구재단이 추진하는 기본연구사업의 지원으로 수행된 이번 연구 성과는 재료과학 분야 국제학술지 ‘어드밴스드 펑셔널 머터리얼즈(Advanced Functional Materials)’에 4월 23일 온라인 게재됐다.
 기사 정정 / 반론
저작권자(c)산업종합저널. 무단전재-재배포금지
기사 정정 / 반론
저작권자(c)산업종합저널. 무단전재-재배포금지
많이 본 뉴스
페로브스카이트 ‘대량 생산 역설’ 풀었다… 韓 연구진, 차세대 디스플레이 소부장 ‘독립’ 선언
차세대 디스플레이 시장의 ‘게임 체인저’로 불리면서도 양산의 기술적 난제에 가로막혀 있던 ‘페로브스카이트(Perovskite)’가 상용화의 임계점을 넘었다. 국내 연구진이 기존 고온 공정의 통념을 깬 ‘극저온 합성법’을 통해 품질 저하 없는 대량 생산 길을 열었기 때문이다. 이는 단순한 기
9년 집념이 뚫은 ‘물의 성배’… 영하 60℃서 액체 임계점 첫 포착
인류가 수백 년간 풀지 못한 물의 미스터리가 지난 24일 정부세종청사서 열린 합동 브리핑을 통해 세상에 공개됐다. 조종영 과학기술정보통신부 기초연구진흥과장의 소개로 시작된 발표는 김경환 포항공대 교수의 학술적 증명과 유선주 박사과정생의 현장 목소리로 이어지며 물의 근원적 비밀을 입체